配资是一种为投资者提供杠杆资金的金融服务!


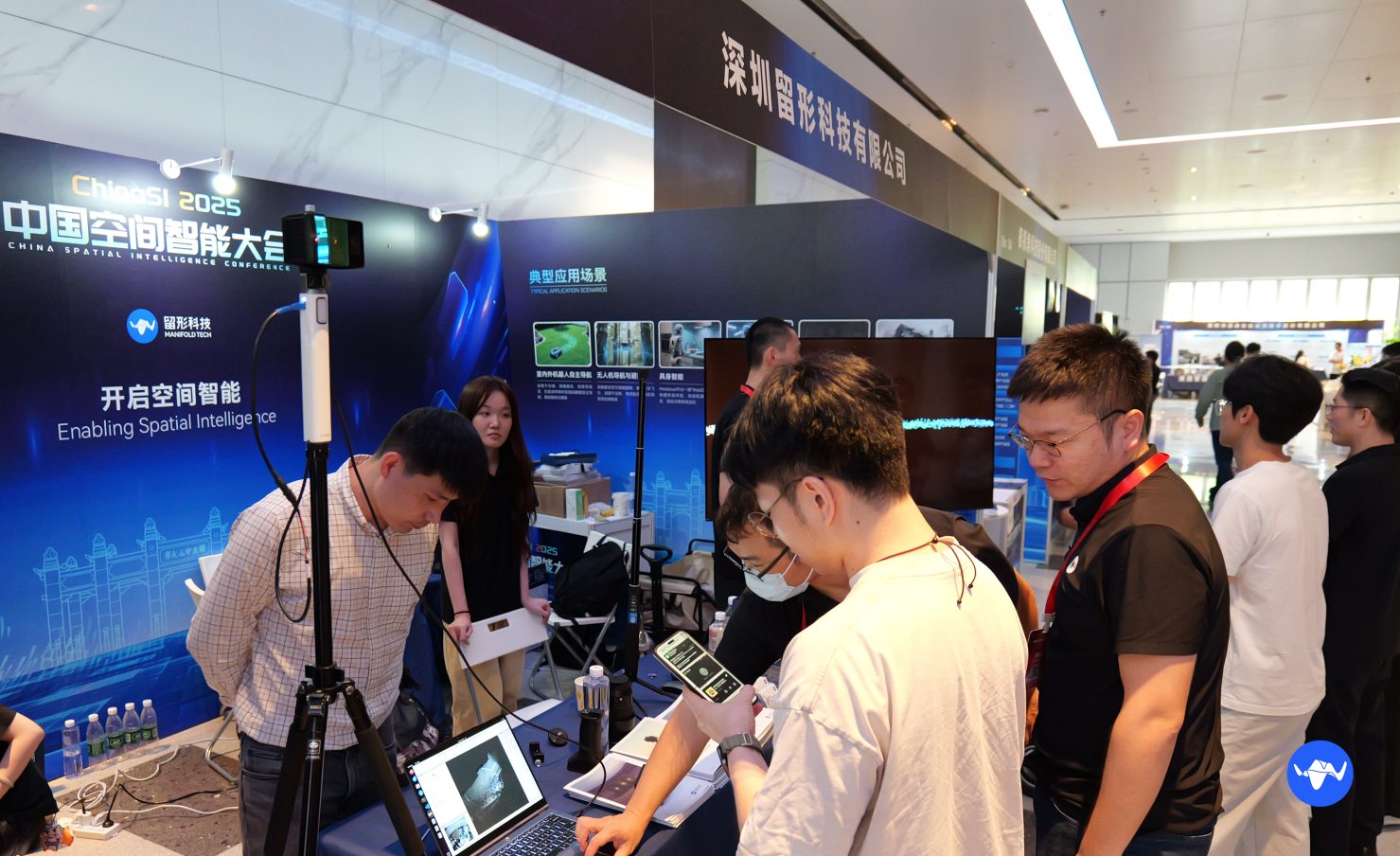
日前在深圳举行的中国空间智能大会(ChinaSI 2025)上,作为空间感知与三维重建领域的创新企业代表,留形科技携旗下两款核心产品——世界首款空间记忆模组 Odin1以及多模态三维环境采集处理设备Pocket2亮相此次大会,集中展示了其在空间智能软硬件系统、自主建图与多场景适应等方面的最新成果。
留形科技CTO徐威在“多模态成像与智能感知”专题论坛上分享了团队在空间智能感知领域所具备的深厚学术与技术积累。针对通用机器人在复杂环境实时感知、长期空间记忆及三维数据云端管理等核心痛点,徐威提到,目前留形科技基于核心技术打造了围绕机器人的产品矩阵:以空间记忆模组Odin1为核心,搭配模块化三维数据采集设备Pocket系列及MindCloud云端平台,形成覆盖前端感知到后端训练的完整解决方案。“只有了解通用机器人并从通用机器人多样化需求出发的团队,才能设计出真正适用的机器人感知模组。”
据南方+记者了解到,Odin1是留形科技于今年6月正式发布的世界首款千元级空间记忆模组。该模组通过深度融合多传感器高性能硬件与内置高性能 MindSLAM 算法,具备高精度、广覆盖的环境感知能力,可赋予智能体长期稳定的环境认知与精准导航能力。“我们希望机器人搭载Odin1后,能够像人类一样具备对空间的智能理解能力。”徐威说。
据介绍,Odin1采用轻量化设计,便于集成至机器人、自主导航平台及智能边缘设备,可在室内外等复杂环境中稳定运行。 据留形科技销售负责人马一帆介绍,Odin1在抢险救灾场景下具备两种典型应用方式:一是通过搭配便携套件,将 Odin1 用作轻量级三维扫描设备,供消防人员在复杂环境中快速部署与使用;二是将其集成至机器人平台,进入灾害现场实现环境数据采集与自主巡检,提升应急响应效率与安全性。
另一款展出产品Pocket2 则融合点云扫描、全景图像采集与细目影像记录于一体,并在标准版基础上增加了顶置双5000万像素全景相机模组。该产品既适用于数字孪生构建、设施运维、机器人仿真训练等前沿场景,也可服务于消防、交通、林业等应急与调查行业。通过与自研的 MindCloud 平台的深度联动,Pocket2 支持从二维图像到三维模型的无缝生成,打通数字孪生“采 → 算 → 模”的全链路工作流。
徐威表示,留形科技将继续专注于空间智能感知和三维重建技术的研发与应用,推动三维感知技术在各行各业的普及应用,解决当前三维数据采集成本高、感知能力不足的问题,为客户提供更高效、更可靠的空间数据服务。“我们期待未来每一台高性能智能机器人都能搭载Odin1这样的空间记忆模组,实现更加精准和智能的三维空间认知。”
南方+记者 叶丹
【作者】 叶丹
【来源】 南方报业传媒集团南方+客户端
汇盈策略提示:文章来自网络,不代表本站观点。